自动驾驶融合定位系列教程四:惯性导航解算
一、概述
惯性导航的解算是一个实现起来非常简单,但是理解起来要费一番功夫的东西,所谓“实现”就是把公式变成代码,所谓“理解”,就是要弄明白几个公式是怎么推导出来的。
鉴于这种情况,我们先把本篇文章的核心思路捋清楚,然后再去搞细节,不然很容易稀里糊涂地陷入繁琐的公式推导当中去,相信各位以前应该都有过这种体会,每一个公式都看得懂,但是连在一起就不知道它为什么要这么干,对于“理解”,“为什么”可比“是什么”要重要的多了。
在这里,“理解”就包含以下三点:
1)做什么:惯性导航解算的目的是什么?
2)怎么做:惯性导航解算的方法是什么?
3)为什么:这个方法是怎么来的?

附赠自动驾驶学习资料和量产经验:链接
二、惯性导航解算的目的
目的当然很简单,从IMU原始的角速度(陀螺仪采集)和加速度(加速度计采集)数据得到它的导航结果(位置、速度、姿态)呗。但如果我们深入下去,好像就不是这一句话能回答的了的了,比如导航信息是怎么描述的,位置和速度好说,姿态就显得略微复杂一些,这是一个long story,喝口水慢慢讲。
1.姿态描述
在导航定位领域,描述一个物体的姿态,常用的描述有欧拉角、旋转矩阵、四元数,这三个概念的理解难度逐渐递增。另外,还有一种表示方式,是等效旋转矢量,它主要作为运算过程中的一个工具,而一般不用来对外作为姿态的描述输出。
1.1 欧拉角
1)欧拉角定义
欧拉角是一个非常直观的概念,一般使用中,它包括俯仰角、横滚角、航向角。
a. 俯仰角
俯仰角描述载体“抬头”的角度大小,一般以抬头(向上)为正,低头(向下)为负
b. 横滚角
横滚角描述载体“侧身”的角度大小,一般以绕着正前方逆时针旋转为正,顺时针旋转为负。

c. 航向角
航向描述载体的朝向,一般以逆时针旋转为正,顺时针旋转为负。(传统组合导航领域与此相反,在此暂时不过多提及,只是让大家看资料时别觉得奇怪就行)

2)欧拉角与坐标轴的对应关系
我们常常把一个xyz直角坐标系放在载体上,这样才方便进行数学描述嘛,如果用前后左右上下来对应载体的方向的话,常见的载体坐标系的对应关系有“右(x)-前(y)-上(z)”、“前(x)-右(y)-下(z)”、“前(x)-左(y)-上(z)”,其中前两种更多的在传统组合导航领域使用,而第三种在机器人、自动驾驶领域使用比较多,由于我们的文章是以后者为主要目标的,所以后面所有的推导就直接使用“前(x)-左(y)-上(z)”坐标系。
在这种坐标系下,我们可以看到,俯仰角是绕y轴的顺时针为正,逆时针为负,横滚角绕x轴的逆时针为正,顺时针为负,航向角绕z轴的逆时针为正,顺时针为负。需要注意的是,一般我们习惯的坐标系表示中,都是逆时针为正,顺时针为负,而俯仰角在这里与y轴的对应关系是反的,这是因为欧拉角有明确的物理意义(比如俯仰角抬头为正、低头为负),违反这种物理意义会对使用带来一些障碍,所以一般宁愿去改变与坐标轴的对应关系。当然,也有很多不愿意转变的,也是很常见,所以大家在使用时要擦亮眼睛,接触一个新的系统之前,要记得首先去核实对应关系。
1.2 旋转矩阵
1)旋转矩阵定义
旋转矩阵是一个非常常见的姿态描述和计算手段了,因为它可以很方便地对坐标系中的矢量进行计算。
假设旋转前,载体系(b系)的单位正交基为 (𝑒1,𝑒2,𝑒3) ,旋转后对应的单位正交基为 (𝑒1′,𝑒2′,𝑒3′) ,在世界坐标系(w系,不随载体的旋转而旋转)下有向量 𝑎 ,它在旋转前后两个坐标系中的坐标分别为 [𝑎1,𝑎2,𝑎3]T 和 [𝑎1′,𝑎2′,𝑎3′]T ,那么有

2)旋转矩阵性质
旋转矩阵的主要特性是单位正交矩阵,即
1.3 四元数
1)四元数定义
对很多接触过导航定位算法的同志们来讲,可能四元数是一个让人头疼的问题了,想把它彻底讲明白,要费很大力气,更何况我自己也不敢说完全把它搞透彻了,曾经尝试过,我记得有一本专门写四元数的书,有好几百页,直接把我劝退,后来退而求其次,觉得从物理意义上大致理解它就行。
先从复数开始讲起,可能更容易理解些。我们知道一个实数,可以对应一个坐标轴上的一个点,姑且写作 𝐴=𝑥 吧,后来又有了复数 𝐴=𝑎+𝑏𝑖 ,发现它不仅可以描述坐标,还可以描述方向了 𝜃=𝑎𝑟𝑐𝑡𝑎𝑛(𝑏𝑎) ,所以这种东西在信号处理里面经常用,这个角度就对应信号的相位。这里可能会自然而然产生一个疑问,我直接用向量描述不也是一样的吗,比如写作 𝐴=(𝑎,𝑏) ,不照样也能得到角度吗?这个问题的核心在于向量不可向复数那样运算,即复数有 𝑖2=−1 的性质,因此两个复数相乘,就有了

这种性质让它具有了向量不具有的优势,复数域的直接运算带来的便利性是无可比拟的。
后来,三维空间的运动描述越来越迫切的时候,复数已经不能满足需求,因为它只有一个角度嘛,不是三维的,汉密尔顿想(可自行百度下汉密尔顿与四元数),能不能再加一维来表示呢,比如 𝐴=𝑎+𝑏𝑖+𝑐𝑗,后来发现不行,那就再加一维 𝐴=𝑎+𝑏𝑖+𝑐𝑗+𝑑𝑘 ,发现行了,于是就有了四元数。哈哈,他发明四元数的过程当然没有那么简单,因为这个“再加一维”牵扯到的东西太多太多,也是理解四元数的关键,不是拍一下脑袋这么简单。
为了弄明白这个“再加一维”,我们可以换一个角度来看它,若另 𝐴=𝑎+𝑏𝑖 , 𝐵=𝑐+𝑑𝑖 ,会发现
在这里,另 𝑘=𝑖𝑗 ,那上式不就是四元数了嘛
因此,从 𝑄=𝐴+𝐵𝑗 可以看出,四元数可以理解为“复数的复数”。
明白了这一点,再回到复数的定义,就可以严格点讲,复数不是在实数上加一维,而是“实数的复数”,看起来好像一句废话,但这样描述是有必要的。更抽象一点,可以总结为,把一类东西(假设类别为X)在复数维度升维,应该写成 𝑋𝑎+𝑋𝑏𝑗 ,而不应该是 𝑋𝑎+𝑏𝑗 (这里的b是一个实数)。当X表示实数时,这两种理解方式并无差异,而当X已经是复数时,两种方式造成的结果就产生了差异。这就是刚才所提到的,为什么汉密尔顿一开始在描述三维空间的角度时,只在复数上加一维( 𝐴=𝑎+𝑏𝑖+𝑐𝑗 )会不行的原因。
由此扩展下去,四元数的复数是八元数,八元数的复数是十六元数,这不是我胡说八道,在数学领域确实是存在的,它们统称为超复数。由于每一次升维,都会损失一个性质(比如四元数没有了乘法交换性,而复数有),且在三维空间领域,四元数已经足够用来描述,因此其他超复数就没有用武之地了,大家也就见不到。
2)四元数性质
四元数的性质很多,我们挑一些后面能用到的说。首先把四元数按照常见的形式写成

a. 单位四元数
在姿态表示中,我们所用的四元数都是单位四元数,即

b. 共轭四元数与四元数的逆
共轭四元数指的是实部相同,虚部相反的四元数

对于单位四元数来讲,它的逆与它的共轭四元数相等

c. 四元数乘法
四元数乘法定义为
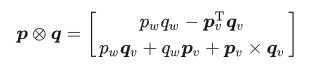
如果你把上面的式子展开,会发现四元数乘法可以表示成矩阵与向量相乘的形式
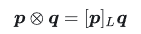
其中
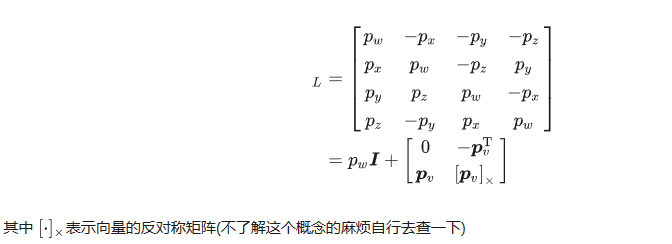
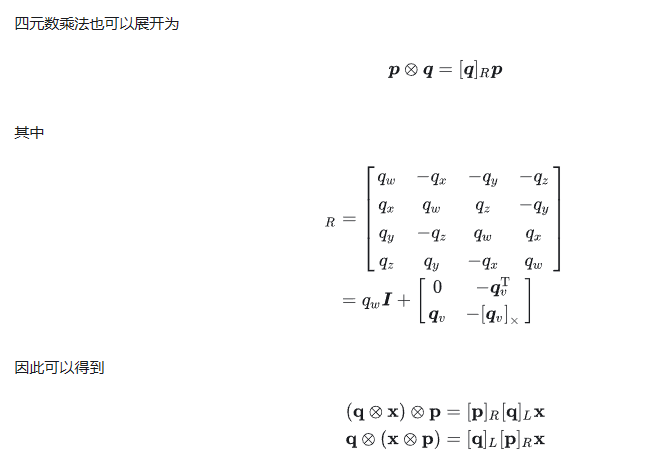
这是两个很重要的性质,后面的推导中会多次用到
1.4 等效旋转矢量
等效旋转矢量,从物理意义上比较好理解,借用欧拉角的定义,它表示物体绕坐标轴分别按三个欧拉角旋转三次,就可以得到它现在所处的姿态。而等效旋转矢量的定义是,物体绕空间某一个轴旋转一次,就可以达到现在的姿态。二者的区别在于,欧拉角的旋转是绕xyz这样的直角坐标轴的,而等效旋转矢量的所绕的轴可能朝向空间任意一个方向,这个轴取决于载体的姿态。
等效旋转矢量可以用向量 𝜙 ,并用 单位向量𝑢表示它的朝向, 𝜙 表示它的大小,因此有
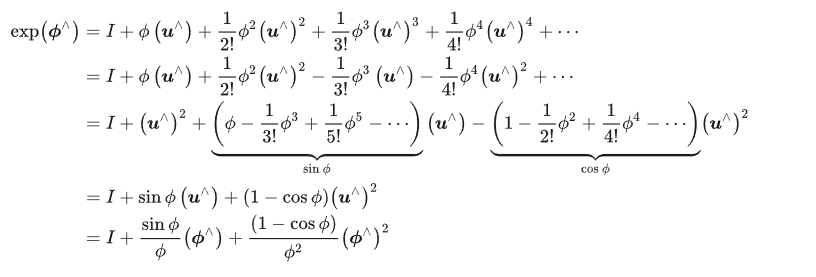
等效旋转矢量的指数形式,是推导中重要的推导过程,因此先在这里给出

由于带着无穷项,因此需要化简才能用。由于反对称矩阵具有如下性质

因此,指数形式可以化简为
1.5 各种表示方式之间的转换
既然各种方式之间是等价的,且实际使用中,各种形式都有可能出现,那么理清它们之间的转换关系就是必要的。不过由于很多推到过程过于复杂且无聊,这里就只能给出结论,对过程感兴趣的自己去查资料吧。
1)欧拉角与旋转矩阵
按照机器人前(x)-左(y)-上(z)的坐标系定义,并令横滚角为 𝛼 、俯仰角为 𝛽 、航向角为 𝛾 ,假设旋转矩阵是按照z-y-x的顺序旋转得来,那么旋转矩阵可以表示为

其中

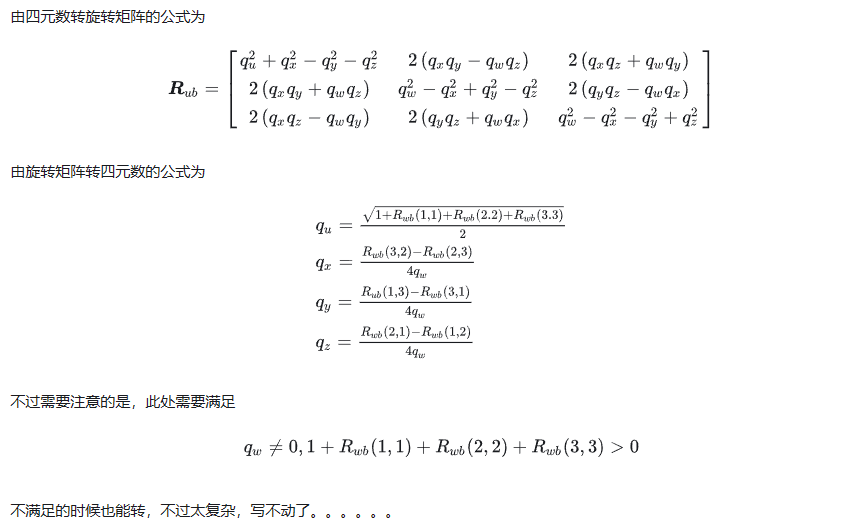
2) 四元数与旋转矩阵
3)旋转矩阵与等效旋转矢量

4) 四元数与等效旋转矢量
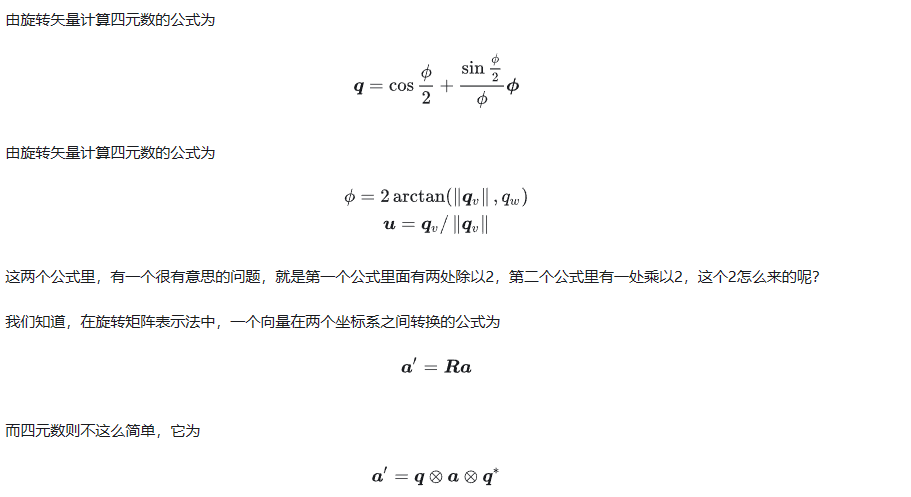
这个也可以从一个比较奇特的角度来解释,大家看一下,一个四元数和一个矢量相乘(其实乘的是矢量对应的纯虚四元数,即实部为0,虚步三个值对应这个三维矢量),得到的是什么?已经忘记的可以网上翻去看一下四元数乘法。结论是乘出来的一个东西,实部不为0,这就尴尬了,一个三维矢量,乘出来变成了一个四维的东西(一个实部和三个虚部),为了解决这个问题,就写成了上面的形式,左乘一个,右乘一个,实际就是对应两次旋转,自然每次就只旋转一半,即每一个四元数对应的角度只是想要的旋转角度的一半,这样改变之后,惊奇地发现,实部永远为0,等于三维矢量先是被第一个四元数给旋转到四维空间,又被第二个四元数给拉回到三维空间了,完美!
三、惯性导航解算的方法
经过上面啰嗦一大堆,我们解决了“做什么”、“怎么做”、“为什么”三个问题中的第一个,接下来解决第二个。
“怎么做”在这里就是怎么去解算的问题了,而解算就是“角速度->姿态”、“加速度->速度”、“速度->位置”(当然由于有坐标系问题,这种描述并不十分严谨,但更容易理解)。看到这些,我们很容易想到,就是个积分问题嘛,把这个积分过程用数学公式表示出来,就等于知道了“怎么做”的问题。
积分公式的形式其实很简单,但它的推导过程比较繁琐,因此这里先给出结论,过程是“为什么”这个环节要解决的问题。另外,积分与微分本是一家,因此本小节会从微分方程引入,讲“为什么”的时候就只讲微分方程怎么来的就好了,这样这两节就可以无缝衔接在一起。
1.基于旋转矩阵的姿态更新
1) 积分形式介绍
可见,求旋转矩阵的问题,最终转化成了求等效旋转矢量的问题。咋求?接着用微分方程求呗。等效旋转矢量的微分方程为(方程怎么来的,同样放在“为什么”中去讲)
这个方程看起来还是比较复杂的,可以也应当化简。在方程右边第二项,可以看到是两个矢量的叉乘,根据叉乘的定义,当两个矢量方向重合时,叉乘的结果为0。一般 imu 的采样频率不会低于 100hz,即 k-1 时刻到 k 时刻的时间间隔不会大于10ms,而载体一般自动驾驶车或者机器人也不会发生过于高频的运动,因此可以近似认为满足叉乘为0的条件,因此可以直接把上式简化为

它对应的积分形式就很简单了

有了旋转矢量的积分形式,那么该旋转矩阵的形式就了然了,直接带进去就行。
但是,到这里会遇到一个问题,我们一直讨论的都是连续时间的,即 k-1 时刻到 k 时刻之间的所有值都是连续可测的,而实际数据都是离散的,只能得到 k-1 和 k 这两个时刻的值,那么必须把上面的连续时间形式高程离散形式,才能继续走下去了。
2)离散时间处理
这就牵扯到常见的三种方法:欧拉法、中值法、龙哥库塔法,三者按复杂程度逐渐递增,按精度也是逐渐递增。我们先从简单的开始说。
a.欧拉法
欧拉法很好理解,虽然我不知道 k-1 到 k 时刻的所有值,但是如果我假设 imu 在这个时间段内是匀速旋转的,那不就解决了吗,此时,对应的旋转矢量为

b.中值法
欧拉法固然简单,但是匀速的假设还是有些太强了,实际使用中会发现精度不够,于是就有了中值法。中值法假设 imu 是匀加速运动的,这就比匀速更高级了一些,此时离散时间形式为

c.龙哥库塔法
中值法假设的匀加速运动,在imu运动更加剧烈的情况下仍然不够,那就继续把模型复杂化呗,龙哥库塔法就是这种,把运动模型搞成一个高阶曲线。由于这部分略显复杂,而且实际使用中,中值法多数情况下已经够用,因此在此处就不对这种方法做过多介绍了。
2.基于四元数的姿态更新
1)积分形式介绍
2) 离散时间处理

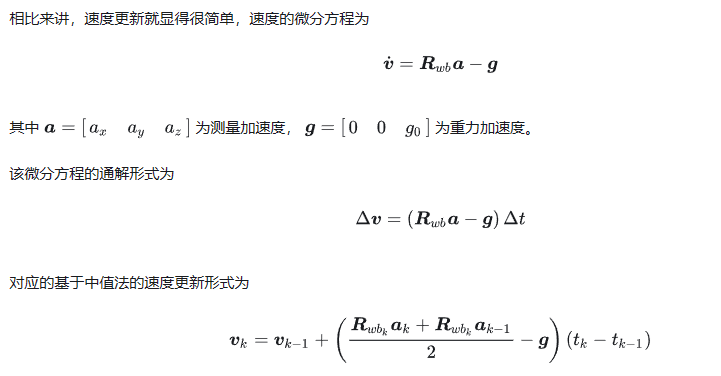
3.速度更新
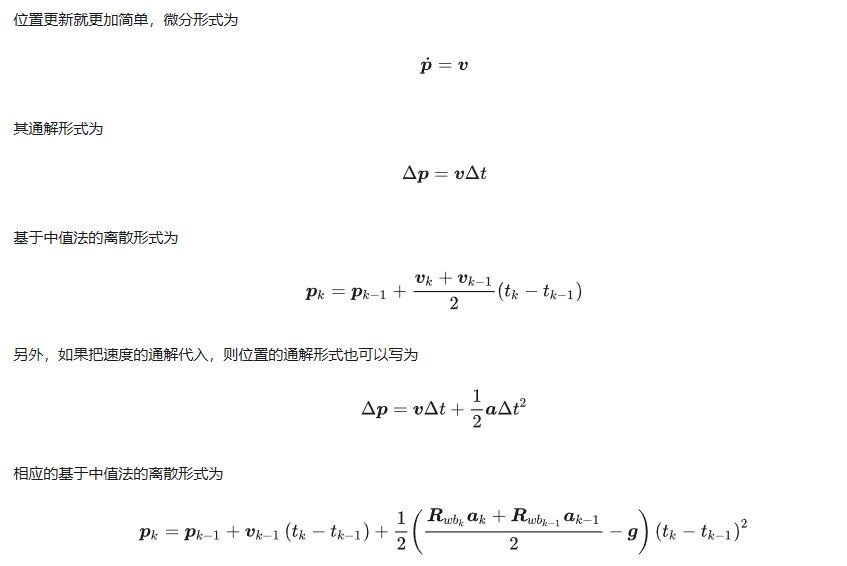
4.位置更新
三、解算方法的来源
这一部分就是要解决“为什么”的问题,其实就是推导刚才用到的那些微分方程怎么来的。由于速度、位置的微分方程过于简单,此处就不介绍了,只介绍旋转矩阵、四元数、旋转矢量的微分方程。
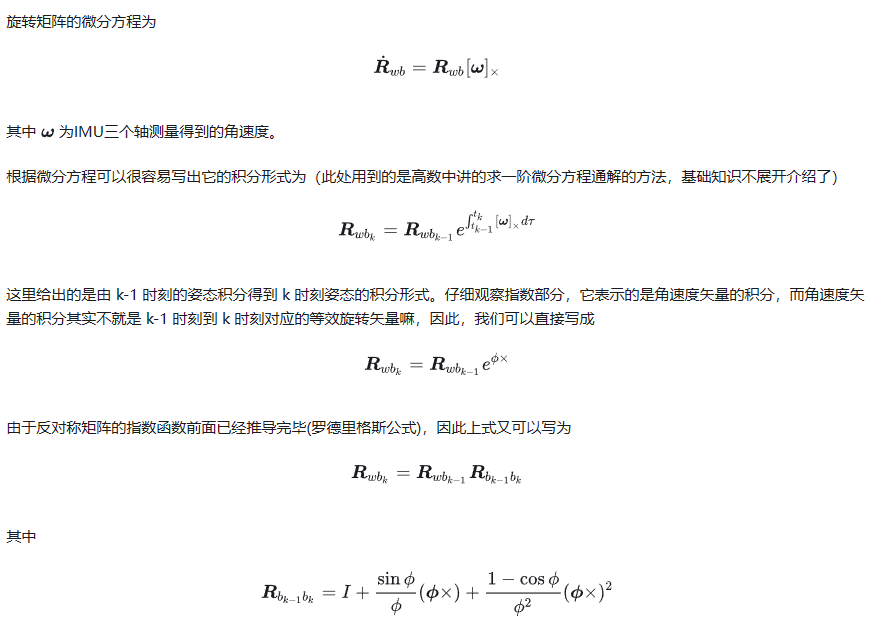
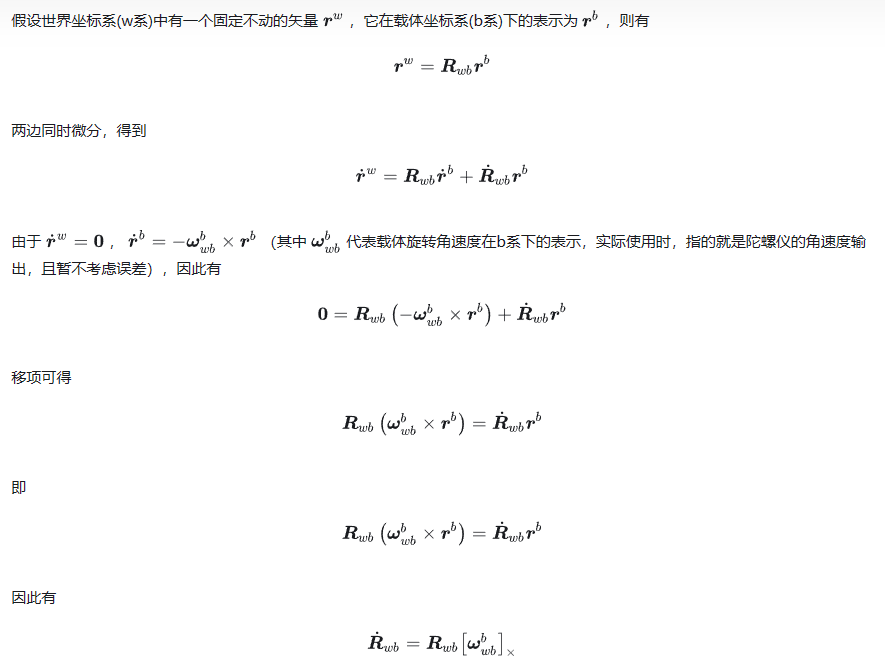
1.旋转矩阵微分方程
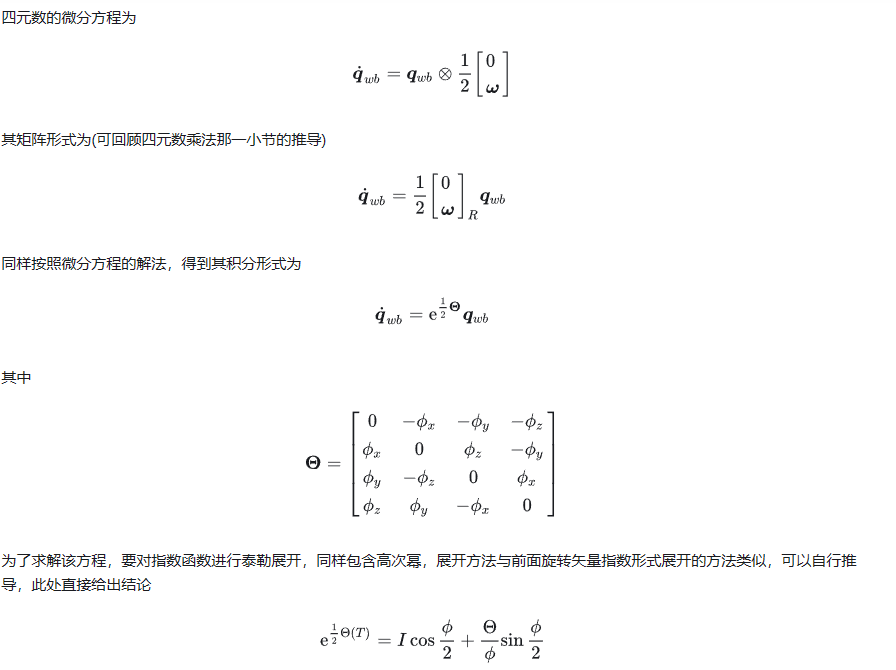
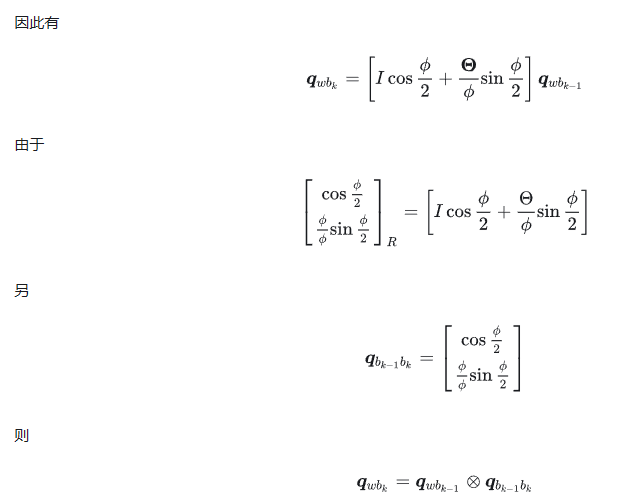
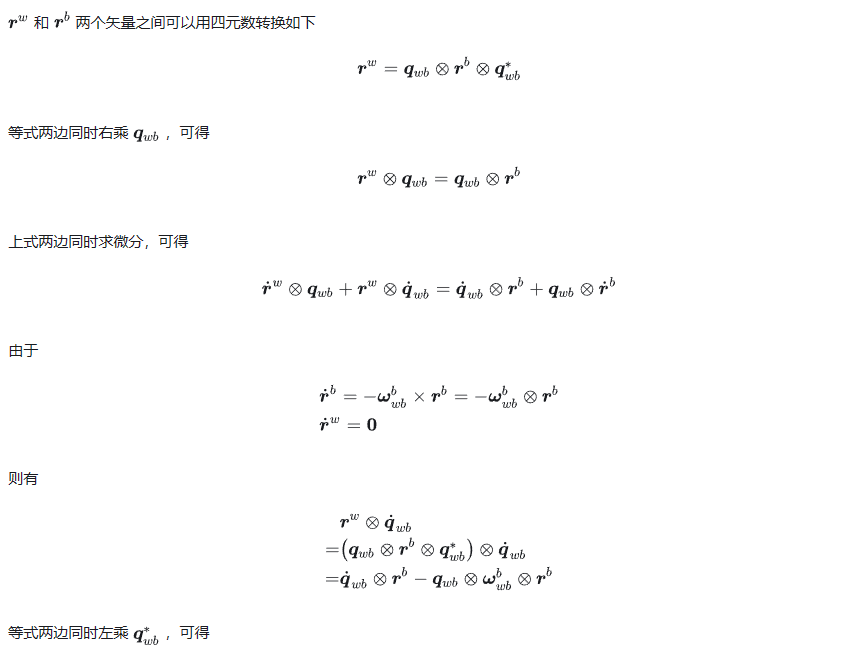
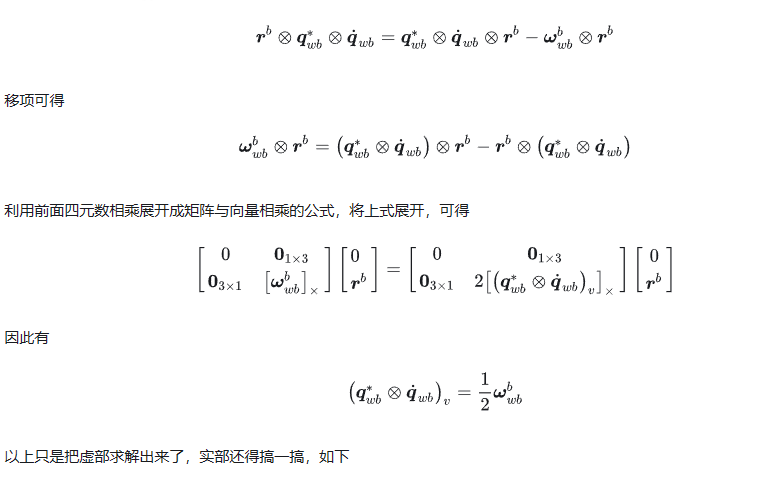
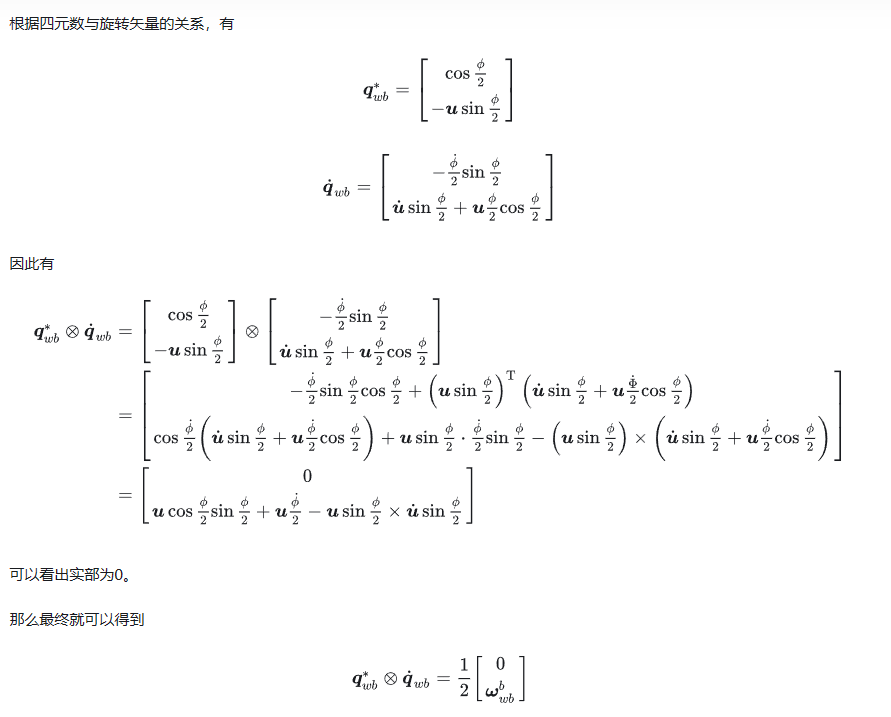
2.四元数微分方程

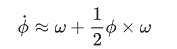
3.旋转矢量微分方程
旋转矢量微分方程的推导就显得更加复杂,这里就借用严恭敏老师《惯性导航与组合导航算法》中的一个中间结论吧,直接给出旋转矢量微分方程的完整形式

如果你愿意把它泰勒展开,那么去除高阶项会得到如下简化形式

这就是前面看到的结果啦。